La matrice F est appelée matrice fondamentale. C'est une matrice de taille 3x3 et de rang 2. La connaissance de cette matrice permet donc en principe d'établir une correspondance entre les deux images.
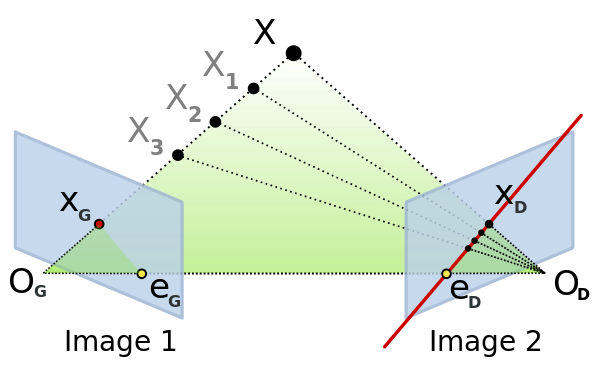
La géométrie épipolaire est un modèle mathématique de géométrie, qui décrit les relations géométriques de différentes photos du même objet, prises de différents points d'observation (Point de vue). Elle permet de décrire les dépendances entre les pixels en correspondance,c'est-à-dire ceux formés par un seul point de l’objet observé sur chacune des images.(Wikipedia)
Contrainte epipolaire: xTF x'=0
x : Un point sur l'image de gauche.
x': Le point correspondant sur l'image de droite.
F : La matrice fondamentale.
Fx': c'est la ligne épipolaire associé à x' dans l'image de gauche.
FTx : c'est la ligne épipolaire associé à x dans l'image de droite.
Dans ce projet on utilise l'algorithme de 8-point, puis on résout le système à partir de 8 correspondances(Matches).
Les résultats
| Image 1 | Image 2 |
 |
|
| Résultat du descripteur SIFT | |
 | |
| Les lignes épipolaires | |
 | |
FIN.